Skewness
Lack of symmetry is called skewness. If a distribution is not symmetrical then it is called a skewed distribution. So, the mean, median and mode are different in value and one tail becomes longer than the other. The skewness may be positive or negative.
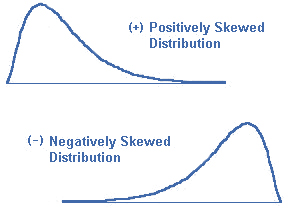
Positively Skewed Distribution
If the frequency curve has a longer tail to right, the distribution is known as a positively skewed distribution and Mean > Median > Mode.
Negatively Skewed Distribution
If the frequency curve has a longer tail to left, the distribution is known as a negatively skewed distribution and Mean < Median < Mode.
Measure of Skewness
The difference between the mean and mode gives an absolute measure of skewness. If we divide this difference by the standard deviation we obtain a relative measure of skewness known as the coefficient and denoted by SK.
Karl Pearson Coefficient of Skewness
\[SK = \frac{{Mean – Mode}}{{S.D}}\]
Sometimes the mode is difficult to find. So we use another formula:
\[SK = \frac{{3\left( {Mean – Median} \right)}}{{S.D}}\]
Bowley’s Coefficient of Skewness
\[SK = \frac{{{Q_1} + {Q_3} – 2Median}}{{{Q_3} – {Q_1}}}\]
Bwabi
March 5 @ 10:42 am
What about product moment coefficient of skewness(based on moments)